乽妏搙 (妏偺戝偒偝)乿偼丆乽夞揮偺戝偒偝乿偺偙偲偽傪巊偭偰掕媊偝傟傞偙偲偵側傝傑偡丅 偙偺乽夞揮偺戝偒偝乿傪埖偆偨傔偵偼丆偦偺慜偵乽夞揮乿偺堄枴偑掕傑偭偰偄側偗傟偽側傝傑偣傫丅 偡側傢偪丆壗偵懳偟偰壗傪偡傞偙偲傪乽夞揮乿偲偄偆偺偐丠偲偄偆偙偲偱偡丅 儐乕僋儕僢僪嬻娫偺婔壗妛偼丆乽夞揮乿傪丆嵟廔揑偵偮偓偺宍偵娨尦偟傑偡丅
 X偺夞揮偼丆俴偵乽惓偺曽岦乿傪掕傔偰偄傞偙偲偵傛傝丆乽塃夞傝偳傟偩偗乿乽嵍夞傝偳傟偩偗乿偱昞尰偝傟傑偡丅 偙偙偱乽挻暯柺乿偲偄偆偙偲偽偑弌偰偒傑偟偨丅 偙傟偵偮偄偰娙扨偵愢柧偟傑偡丅 俁師尦嬻娫偱偼丆乽嬻娫乿乽暯柺乿乽捈慄乿乽揰乿偑偁傝傑偡丅 俀師尦嬻娫偩偲丆乽暯柺乿乽捈慄乿乽揰乿偵側傝傑偡丅 偙偺挷巕傪係師尦偱傕傗傞偲丆乽慡嬻娫乿乽嬻娫乿乽暯柺乿乽捈慄乿乽揰乿偺俆偮偵側傝傑偡丅 俆師尦偩偲丆乽慡嬻娫乿乽係師尦偺嬻娫乿乽嬻娫乿乽暯柺乿乽捈慄乿乽揰乿偺俇偮偱偡丅 偙偺俇偮偺昞尰偵堦娧惈/楢懕惈偑側偄偺偼丆俁師尦嬻娫 (傢偨偟偨偪偑乽儕傾儖側嬻娫乿偲偄偆偙偲偵偟偰偄傞傕偺) 偱巊偭偰偄傞乽嬻娫乿乽暯柺乿乽捈慄乿乽揰乿偺偙偲偽偵敍傜傟偰偄傞偐傜偱偡丅 偦偙偱丆乽挻暯柺乿偲偄偆偙偲偽傪巊偆偙偲偵偟傑偡丅 偡側傢偪丆儕傾儖側嬻娫偲偟偰俁師尦嬻娫偱巊偭偰偒偨乽嬻娫乿乽暯柺乿乽捈慄乿乽揰乿傪丆偦傟偧傟乽俁師尦偺挻暯柺乿乽俀師尦偺挻暯柺乿乽侾師尦偺挻暯柺乿乽侽師尦偺挻暯柺乿偲屇傇傛偆偵偟傑偡丅 忋偺乽夞揮乿偺掕媊偵栠傞偲丆
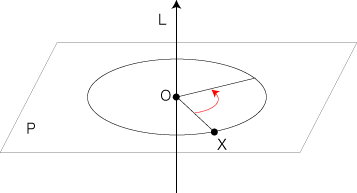
俽偑俁師尦 (乽嬻娫乿) 偩偭偨傜丆俹偼乽暯柺乿 俽偑係師尦偩偭偨傜丆俹偼乽嬻娫乿 偙偙偱丆乽傾儗丠両乿偲巚偄傑偣傫偱偟偨偐丅 乽暯柺俽偱偺丆俷傪夞揮偺拞怱偲偡傞丆俹忋偺丆倃偺夞揮乿偲偼丆壗偱偟傚偆丠 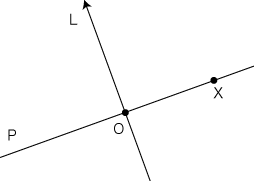 偙傟偼丆乽俷傪拞怱偲偡傞P忋偺懳徧揰偵堏傞偐丆偦偺傑傑偱偄傞偐乿偺俀捠傝偺憖嶌偲偄偆偙偲偵側傝傑偡丅 偙傟偑丆乽暯柺乿偵偍偗傞乽夞揮乿偱偡丅 偙偺傛偆偵尵偆偲丆偮偓偺斀榑偑偒偭偲弌偰偔傞偱偟傚偆丗
 偟偐偟丆偙偺奊傪尒偰偄傞偁側偨偺娽偼丆偳偙偵偁傝傑偡偐丠 俁師尦嬻娫偺拞偵偁傝傑偡偹丅 忋偺夞揮傪峫偊偰偄傞偲偒偼丆埫栙偵俁師尦嬻娫傪巊偭偰偄傑偡丅 偦偟偰丆俷傪捠偭偰帺暘偺娽俤偵岦偐偆桳岦捈慄傪丆埫栙偵夞揮幉偲偟偰巊偭偰偄傞偺偱偡丅
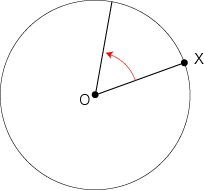
偁側偨偼丆塃夞傝(斀帪寁夞傝) 傪寛傔傜傟傑偣傫偐傜丆巜帵偝傟偨憖嶌傪偡傞偙偲偑偱偒傑偣傫丅
|