tiny YOLO は カメラの向きの ±25° の範囲に目標物体があれば,これをよく検出できる。  <±25° の区間>がつながるようにカメラを pan させようとすると, ±45° が適当な値となる:  そして,カメラの位置を 0°,±45° の3箇所にしたときにカメラ画像がカバーする区間は,±70° となる:  そこで,GoPiGo がつぎの3方向を向くようにすると,カメラ映像は 360° をカバーする。──即ち,目標物体を隈無く探したことになる:  そこで,つぎを目標物体サーチのアルゴリズムとする: 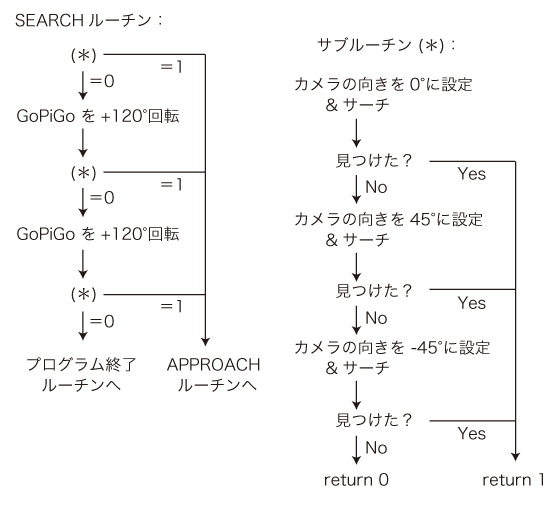 |