#!/usr/bin/python
from __future__ import print_function
# try to import the auto_detection library
try:
import auto_detect_robot
no_auto_detect = False
except:
no_auto_detect = True
try:
import wx
except ImportError:
raise ImportError("The wxPython module is required to run this program")
import gopigo3
import easygopigo3 as easy
try:
gpg = easy.EasyGoPiGo3()
except Exception as e:
print("GoPiGo3 cannot be instanstiated. Most likely wrong firmware version")
print(e)
app = wx.App()
wx.MessageBox('GoPiGo3 not found.', 'GoPiGo3 not found', wx.OK | wx.ICON_ERROR)
exit()
import atexit
atexit.register(gpg.stop)
left_led=0
right_led=0
left_eye=0
right_eye=0
v=gpg.volt()
f=gpg.get_version_firmware()
ICON_PATH = "/home/pi/Dexter/GoPiGo3/Software/Python/Examples/Control_Panel/"
class MainPanel(wx.Panel):
""""""
#----------------------------------------------------------------------
def __init__(self, parent):
wx.Panel.__init__(self, parent=parent)
self.SetBackgroundStyle(wx.BG_STYLE_CUSTOM)
self.SetBackgroundColour(wx.WHITE)
self.frame = parent
# main sizer
main_sizer = wx.BoxSizer(wx.VERTICAL)
main_sizer.AddSpacer(30)
if no_auto_detect == True:
detected_robot = auto_detect_robot.autodetect()
print(detected_robot)
if detected_robot != "GoPiGo3":
detected_robot_str = wx.StaticText(self,-1,
label="Warning: Could not find a GoPiGo3")
detected_robot_str.SetForegroundColour('red')
warning_sizer = wx.BoxSizer(wx.HORIZONTAL)
warning_sizer.Add(detected_robot_str, 0, wx.EXPAND| wx.ALIGN_CENTER)
main_sizer.Add(warning_sizer, 0, wx.ALIGN_CENTER)
led_sizer = wx.BoxSizer(wx.HORIZONTAL)
left_led_button = wx.Button(self, label="Left LED")
self.Bind(wx.EVT_BUTTON, self.left_led_button_OnButtonClick, left_led_button)
right_led_button = wx.Button(self, label="Right LED")
self.Bind(wx.EVT_BUTTON, self.right_led_button_OnButtonClick, right_led_button)
led_sizer.AddSpacer(30)
led_sizer.Add(left_led_button, 0, wx.ALIGN_CENTER)
led_sizer.AddSpacer(80)
led_sizer.Add(right_led_button, 0, wx.ALIGN_CENTER)
led_sizer.AddSpacer(30)
eyesSizer = wx.BoxSizer(wx.HORIZONTAL)
left_eye_button = wx.Button(self, label="Left eye")
self.Bind(wx.EVT_BUTTON, self.left_eye_button_OnButtonClick, left_eye_button)
icon_sizer = wx.BoxSizer(wx.HORIZONTAL)
bmp = wx.Bitmap(ICON_PATH+"dex.png",type=wx.BITMAP_TYPE_PNG)
robotbitmap=wx.StaticBitmap(self, bitmap=bmp)
right_eye_button = wx.Button(self, label="Right eye")
self.Bind(wx.EVT_BUTTON, self.right_eye_button_OnButtonClick, right_eye_button)
eyesSizer.AddSpacer(30)
eyesSizer.Add(right_eye_button, 0)
eyesSizer.Add(robotbitmap, 0)
eyesSizer.Add(left_eye_button, 0)
eyesSizer.AddSpacer(30)
fwd_sizer = wx.BoxSizer(wx.HORIZONTAL)
fwd_button = wx.Button(self, label="Forward")
self.Bind(wx.EVT_BUTTON, self.fwd_button_OnButtonClick, fwd_button)
fwd_sizer.Add(fwd_button, 0, wx.ALIGN_CENTER)
middle_sizer = wx.BoxSizer(wx.HORIZONTAL)
left_button = wx.Button(self, label="Left")
self.Bind(wx.EVT_BUTTON, self.left_button_OnButtonClick, left_button)
stop_button = wx.Button(self, label="Stop")
stop_button.SetBackgroundColour('red')
self.Bind(wx.EVT_BUTTON, self.stop_button_OnButtonClick, stop_button)
right_button = wx.Button(self, label="Right")
self.Bind(wx.EVT_BUTTON, self.right_button_OnButtonClick, right_button)
middle_sizer.Add(left_button, 0, wx.ALIGN_CENTER)
middle_sizer.Add(stop_button, 0, wx.ALIGN_CENTER)
middle_sizer.Add(right_button, 0, wx.ALIGN_CENTER)
bwdSizer = wx.BoxSizer(wx.HORIZONTAL)
bwd_button = wx.Button(self, label="Back")
self.Bind(wx.EVT_BUTTON, self.bwd_button_OnButtonClick, bwd_button)
bwdSizer.Add(bwd_button, 0, wx.ALIGN_CENTER)
batterySizer = wx.BoxSizer(wx.HORIZONTAL)
battery_button = wx.Button(self, label="Check Battery Voltage")
self.Bind(wx.EVT_BUTTON, self.battery_button_OnButtonClick, battery_button)
self.battery_label = wx.StaticText(self, label=str(round(v,1))+"V")
batterySizer.AddSpacer(30)
batterySizer.Add(battery_button, 0, wx.ALIGN_LEFT )
batterySizer.AddSpacer(20)
batterySizer.Add( self.battery_label,0, wx.ALIGN_CENTER|wx.EXPAND )
firmwareSizer = wx.BoxSizer(wx.HORIZONTAL)
firmware_button = wx.Button(self,-1,label="Check Firmware Version")
self.Bind(wx.EVT_BUTTON, self.firmware_button_OnButtonClick, firmware_button)
self.firmware_label = wx.StaticText(self,-1,label=str(f))
firmwareSizer.AddSpacer(30)
firmwareSizer.Add(firmware_button, 0, wx.ALIGN_LEFT)
firmwareSizer.AddSpacer(15)
firmwareSizer.Add( self.firmware_label, 0, wx.ALIGN_CENTER|wx.EXPAND )
# Exit
exit_sizer = wx.BoxSizer(wx.HORIZONTAL)
exit_button = wx.Button(self, label="Exit")
exit_button.Bind(wx.EVT_BUTTON, self.onClose)
exit_sizer.Add(exit_button,0, wx.ALIGN_RIGHT)
exit_sizer.AddSpacer(30)
main_sizer.Add(led_sizer, 0, wx.ALIGN_CENTER)
main_sizer.Add(eyesSizer, 0, wx.ALIGN_CENTER)
main_sizer.AddSpacer(20)
main_sizer.Add(fwd_sizer, 0, wx.ALIGN_CENTER)
main_sizer.Add(middle_sizer, 0, wx.ALIGN_CENTER)
main_sizer.Add(bwdSizer, 0, wx.ALIGN_CENTER)
main_sizer.AddSpacer(30)
main_sizer.Add(batterySizer, 0, wx.ALIGN_LEFT)
main_sizer.Add(firmwareSizer, 0, wx.ALIGN_LEFT)
main_sizer.AddSpacer(20)
main_sizer.Add(exit_sizer,0,wx.ALIGN_RIGHT)
self.SetSizerAndFit(main_sizer)
def battery_button_OnButtonClick(self,event):
global v
# v=gopigo.volt()
v=round(gpg.volt(),1)
self.battery_label.SetLabel(str(v)+"V")
def firmware_button_OnButtonClick(self,event):
global f
f=gpg.get_version_firmware()
self.firmware_label.SetLabel(str(f))
def stop_button_OnButtonClick(self,event):
f=gpg.stop()
def left_button_OnButtonClick(self,event):
gpg.set_speed(100)
f=gpg.left()
def right_button_OnButtonClick(self,event):
gpg.set_speed(100)
f=gpg.right()
def fwd_button_OnButtonClick(self,event):
gpg.set_speed(200)
f=gpg.forward()
def bwd_button_OnButtonClick(self,event):
gpg.set_speed(200)
f=gpg.backward()
def left_led_button_OnButtonClick(self,event):
global left_led
if left_led==0:
gpg.led_on(1)
left_led=1
else :
gpg.led_off(1)
left_led=0
def right_led_button_OnButtonClick(self,event):
global right_led
if right_led==0:
gpg.led_on(0)
right_led=1
else :
gpg.led_off(0)
right_led=0
def right_eye_button_OnButtonClick(self,event):
global right_eye
if right_eye==0:
gpg.open_right_eye()
right_eye=1
else :
gpg.close_right_eye()
right_eye=0
def left_eye_button_OnButtonClick(self,event):
global left_eye
if left_eye==0:
gpg.open_left_eye()
left_eye=1
else :
gpg.close_left_eye()
left_eye=0
def onClose(self, event): # Close the entire program.
self.frame.Close()
class MainFrame(wx.Frame):
def __init__(self):
wx.Log.SetVerbose(False)
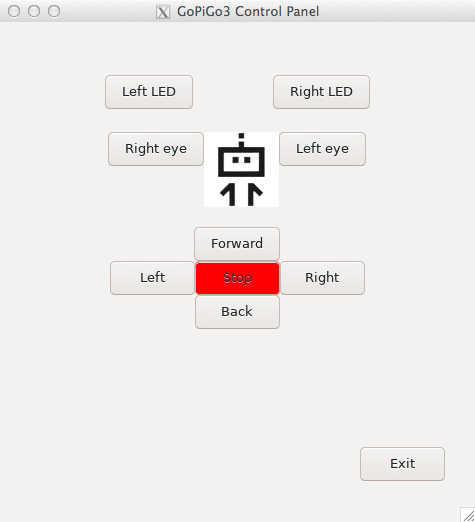
wx.Frame.__init__(self, None, title='GoPiGo3 Control Panel', size=(475,500))
panel = MainPanel(self)
self.Center()
class Main(wx.App):
def __init__(self, redirect=False, filename=None):
"""Constructor"""
wx.App.__init__(self, redirect, filename)
dlg = MainFrame()
dlg.Show()
if __name__ == "__main__":
app = Main()
app.MainLoop()
|