佐藤 (2005) から引用
雲微物理過程の導入, そして 並列計算機 (parallel computer) への移行 大気大循環モデルを非静力学モデル化し雲微物理過程を直接計算する全球雲解像モデルに発展させるためには, スベクトルモデルに基礎をおいたこれまでの力学コアを根本から見直す必要性に迫られたのである。 この問題を解決するために. 2000年代のはじめに建設された高速コンピュータのアプリケーシヨンソフトのひとつとして開発が進められたのが, 非静力雲解像大気大循環モデル NICAM (Nonhydrostatic Icosahedral Atmospheric Model) である。 開発を担当したのは東京大学気候システム研究センター (Center for Climate System Research : CCSR) の佐藤と海洋研究開発機構地球フロンティア研究システム (Japan Agency for Marine-Earth Science and Technology : JAMSTEC) の富田が率いる研究グループであった。 超並列化に対応した NICAM は, ベクトル計算機を用いることで,
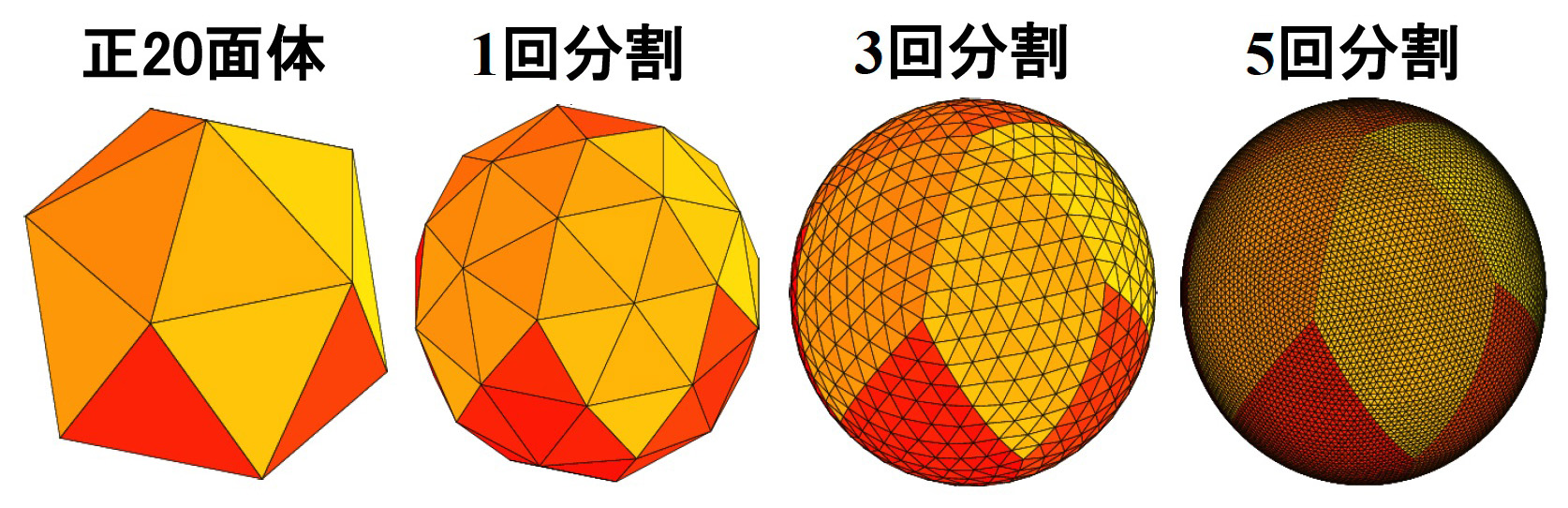
‥‥‥‥ この全球非静力雲解像モデルは, 来るべき超並列計算機の時代に対応して, 正二十面体格子の分割という方法で自動並列化を行う力学フレームを採用している。 これは, 上述の緯度経度格子による極問題を回避した格子モデルである。 雲微物理過程を含んだ方程式系は三角形を基本とした六角形または五角形の領域をコントロールボリュームに選ぴ, フラックス表示のバランス方程式に基づいた力学コアを採用している。 はじめに, 正二十面体格子を Glevel-O と命名しそのひとつの三角形を4つに分割した格子を Glevel-1 のようによぶことにすると,
Glevel-11 で全球を3.5kmの格子
2010年代の高速計算機を用いることで Glevel-13 の全球 0.7km格子の雲解像モデルの時間積分が可能となった。 並列化に関しては, 正二十面体の2つの三角形を合わせた四角形でデータ行列としての (i, j) 領域を定義すると正二十面体は10領域に分割されるのでこれを Rlevel-Oと命名する。 この場合10領域を10 コアで並列化すると最も効率が良いが, その約数の 5, 2, 1 コアで並列化することも可能である。 以下同様に1 つの三角形を4 分割することで Rlevel-1 は40領域, Rlevel-2 は160領域, Rlevel-4 は 2,560 領域のように分割される。 格子と領域の細分化は Glevel と Rlevel の2つのパラメータで決定し, 分割された領域に対して並列数を指定すれば自動並列化が行われる。 NICAM は全球雲解像が特徴であるが, 雲微物理過程は Glevel-9 の14km 格子から導入される。 低解像度モデルでは, 一般的な積雲対流パラメタリゼーションが用いられる。
|