「地図の接続」や「微分」の概念の導出では,ここで示す「ベクトルの平行移動」が方法になる。
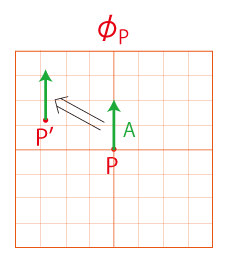
\(\phi_P\) の上で,ベクトル \({\bf A} \) をつぎのように平行移動する:
\(\phi_P\) を \(\phi_{P'}\) に読み込む:
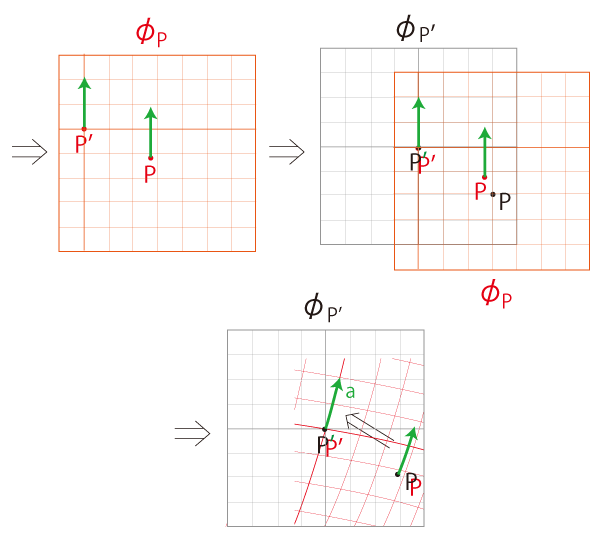
このとき,ベクトル \({\bf A}\) に対し, \({\bf a}\) はどのくらい平行関係からずれているか?
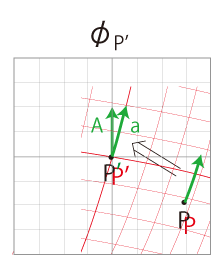
\( \phi_{P'}\) のデカルト座標と曲線座標を,それぞれ \(X^i,\, x^i \) で表す。
二つの座標は,つぎのように変換される
(  「座標変換式」) : 「座標変換式」) :
\[
\left(
\begin{array}{c}
X^1 \\
\vdots \\
X^n \\
\end{array}
\right)
\ =\
\left(
\begin{array}{ccc}
\frac{\partial X^1}{\partial x^1} & \cdots & \frac{\partial X^1}{\partial x^n} \\
& \cdots & \\
\frac{\partial X^n}{\partial x^1} & \cdots & \frac{\partial X^n}{\partial x^n} \\
\end{array}
\right)
\left(
\begin{array}{c}
x^1 \\
\vdots \\
x^n \\
\end{array}
\right)
\]
\(X^i\) 座標の基底と \( x^i \) 座標の基底を,それぞれ
\[
\{ {\bf E}_1,\,\cdots,\,{\bf E}_n \}
\\ \{ {\bf e}_1,\,\cdots,\,{\bf e}_n \}
\]
とすると,
\[
( {\bf e}_1,\,\cdots,\,{\bf e}_n )
\ =\
( {\bf E}_1,\,\cdots,\,{\bf E}_n )
\left(
\begin{array}{ccc}
\frac{\partial X^1}{\partial x^1} & \cdots & \frac{\partial X^1}{\partial x^n} \\
& \cdots & \\
\frac{\partial X^n}{\partial x^1} & \cdots & \frac{\partial X^n}{\partial x^n} \\
\end{array}
\right)
\]
\({\bf a}\) の \(X^i\) 座標と \(x^i \) 座標を,それぞれ
\[
A_i = {\bf a} \cdot {\bf E}_i
\\ a_i = {\bf a} \cdot {\bf e}_i
\]
とする。──ここで添字が下付けなのは,共変座標だから
( 「共変座標」)。
備考 : \({\bf a}\) の \(x^i \) 座標 \( a_i \) は,\({\bf A}\) の \(X^i\) 座標と等しい。
このとき
\[
\begin{align*}
a_i &= {\bf a} \cdot {\bf e}_i
= {\bf a} \cdot \sum_j \frac{\partial {X}^i}{\partial {x}^j}\, {\bf E}_j
= \sum_j \frac{\partial {X}^i}{\partial {x}^j}\, {\bf a} \cdot {\bf E}_j
\\&= \sum_j \frac{\partial {X}^i}{\partial {x}^j}\, A_j
\end{align*}
\\ \\
\left(
\begin{array}{c}
a_1 \\
\vdots \\
a_n \\
\end{array}
\right)
\ =\
\left(
\begin{array}{ccc}
\frac{\partial X^1}{\partial x^1} & \cdots & \frac{\partial X^1}{\partial x^n} \\
& \cdots & \\
\frac{\partial X^n}{\partial x^1} & \cdots & \frac{\partial X^n}{\partial x^n} \\
\end{array}
\right)
\left(
\begin{array}{c}
A_1 \\
\vdots \\
A_n \\
\end{array}
\right)
\]
|