Up
Target Reach (目標物体に到達する)
作成: 2021-05-18
更新: 2021-05-26
Target Reach を,つぎの2つを合わせることで実現する:
目標物体を,視野の中心に捉える
視野の中心に捉えた目標物体との距離を,徐々につめていく
ステップ
ターゲットが視界の中にあるところから開始
回路
プログラム
ターゲットが視界の外にあるところから開始──カメラの pan を加える
<ターゲット・サーチ>アルゴリズム
カメラマウント45°回転,GoPiGo 45,120°回転の入力値
回路
プログラム ( project's final solution !)
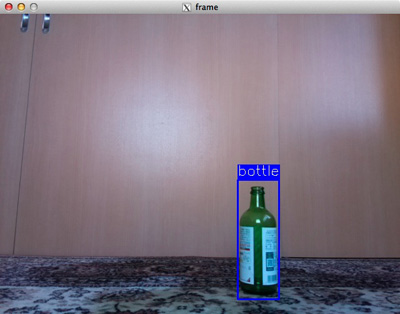
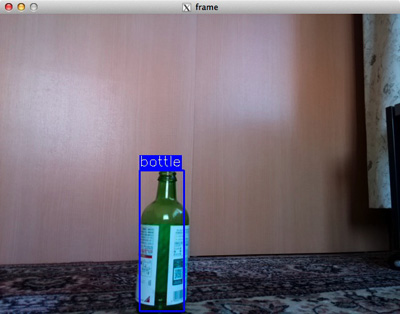
センサーは高さが固定なので,目標物体は縦長であることが必要。
ということで,目標物体には "bottle" を用いることにした。
bottle は,検出されやすいものを択ぶ。
──透明なものはダメ,下のボトルは "vase" と認識されやすい,等々あり。
bottle に接近中のカメラ画像
(向きを調整しつつ前進):